微软近日发布 Rho-alpha 模型,将研究重点指向机器人领域长期存在的核心难题——精细化手部操作能力。不同于以往依赖规则或脚本控制的机器人方案,Rho-alpha 试图让 AI 在模型层面理解“如何使用双手”以及“为何这 ...
|
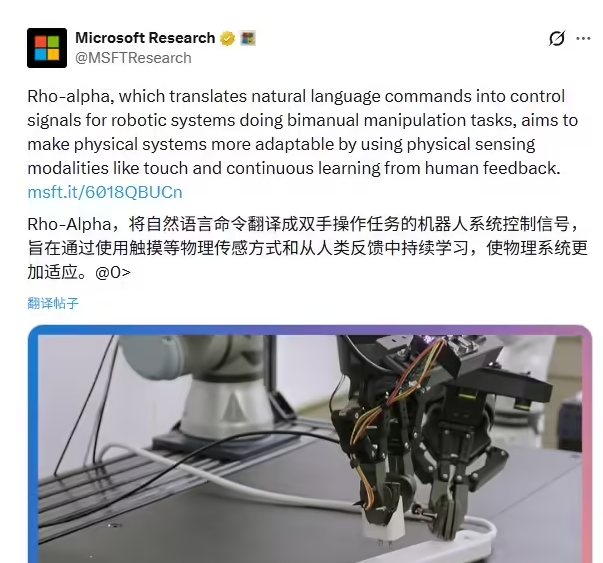
微软近日发布 Rho-alpha 模型,将研究重点指向机器人领域长期存在的核心难题——精细化手部操作能力。不同于以往依赖规则或脚本控制的机器人方案,Rho-alpha 试图让 AI 在模型层面理解“如何使用双手”以及“为何这样操作”。
从技术定位来看,Rho-alpha 属于面向机器人操作任务的专用 AI 模型,核心目标并非内容生成,而是实现感知、理解与动作控制的深度融合。通过对手部动作、物体交互及物理反馈进行联合建模,机器人能够在更复杂、非结构化的环境中完成连续操作任务。 业内认为,“手”的问题一直是具身智能落地的关键瓶颈。相比视觉或导航,手部操作涉及更高自由度控制和实时反馈调节。Rho-alpha 的出现,体现出机器人 AI 正从“规则驱动”向“模型驱动”转变,也标志着具身智能进入更强调工程化能力的新阶段。 从产业角度看,具备手部理解与泛化能力的机器人,有望在制造、物流、医疗辅助及服务机器人等场景中拓展应用边界。随着模型能力与系统工程持续融合,机器人距离进入真实生产环境正在进一步缩短。 |


官方手机版

微信公众号

商务合作

评论